Turtlebot
In my final year of engineering, diving into the TurtleBot project was a turning point. It sparked my drive to solve real-life problems in ways that truly matter to users. That experience fueled my path toward Human-Computer Interaction (HCI), where I'm passionate about crafting tech solutions that captivate users and tackle pressing issues head-on. After which, I applied to IDC School of Design, IIT Bombay for Interaction Design.
Project Overview:
This initiative delves into the transformation of the TurtleBot, harnessing open-source platforms and accessible hardware to craft an indoor service robot. Through the integration of Microsoft's Kinect and sophisticated SLAM algorithms, this robot gains exceptional 3D mapping and autonomous navigation capacities, controlled conveniently via mobile devices.
Ethos of Innovation and Social Impact:
At its core, this endeavor embodies the ethos of innovation for societal advancement. Its applications transcend mere technological innovation; they hold promise for inclusivity and accessibility, particularly for underserved communities, specially in India. The focus is on harnessing technology not just for progress but for meaningful impact on human lives. The project resonates deeply with the evolving field of human-robot interaction and making it low-cost so it is more accessable to Indian users. Its potential extends to facilitating seamless interactions for individuals not well-versed in technical nuances. The core aim is to create technology that bridges gaps, empowering individuals and fostering independence and making it low-cost so the users from different backgrounds are able to afford it.
Abstract
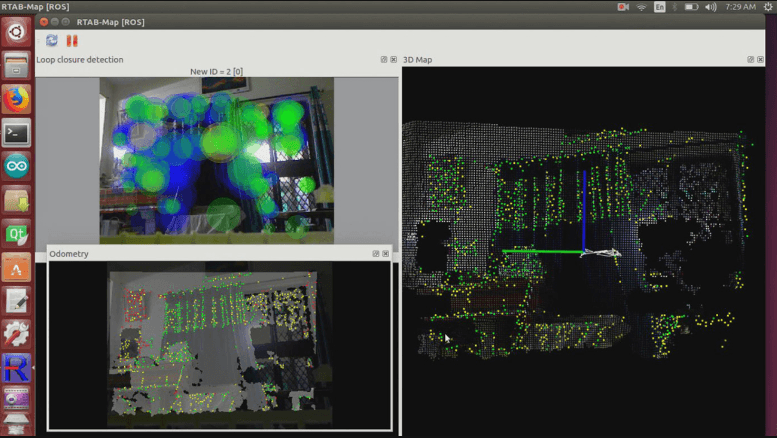
As technology becomes faster, smarter, and more compact, it’s important to look at and work for its potential social benefits. One such area of application is elderly and disabled assistance. This paper details the simulation and hardware of an indoor service robot based on the TurtleBot (developed by the robotics company Willow Garage). The design, simulation, and development for TurtleBot is done entirely on open source platforms, thus significantly reducing costs. The sensors, microcontrollers, microcomputer and other components are also readily available online at non-prohibitive costs. The TurtleBot repurposes Microsoft’s Kinect (a motion sensing device to supplement their XBox console) to create a 3D map and apply a simultaneous localisation and mapping (SLAM) algorithm.
Introduction
Human-robot interaction is advancing swiftly, enabling robots to seamlessly blend into our lives. The TurtleBot kit, featuring Microsoft's Kinect, Raspberry Pi, Arduino UNO, and other sensors, simplifies robotics. Easy to procure and assemble with off-the-shelf components, it's designed for accessibility and versatility in diverse environments.
TurtleBot Configuration:
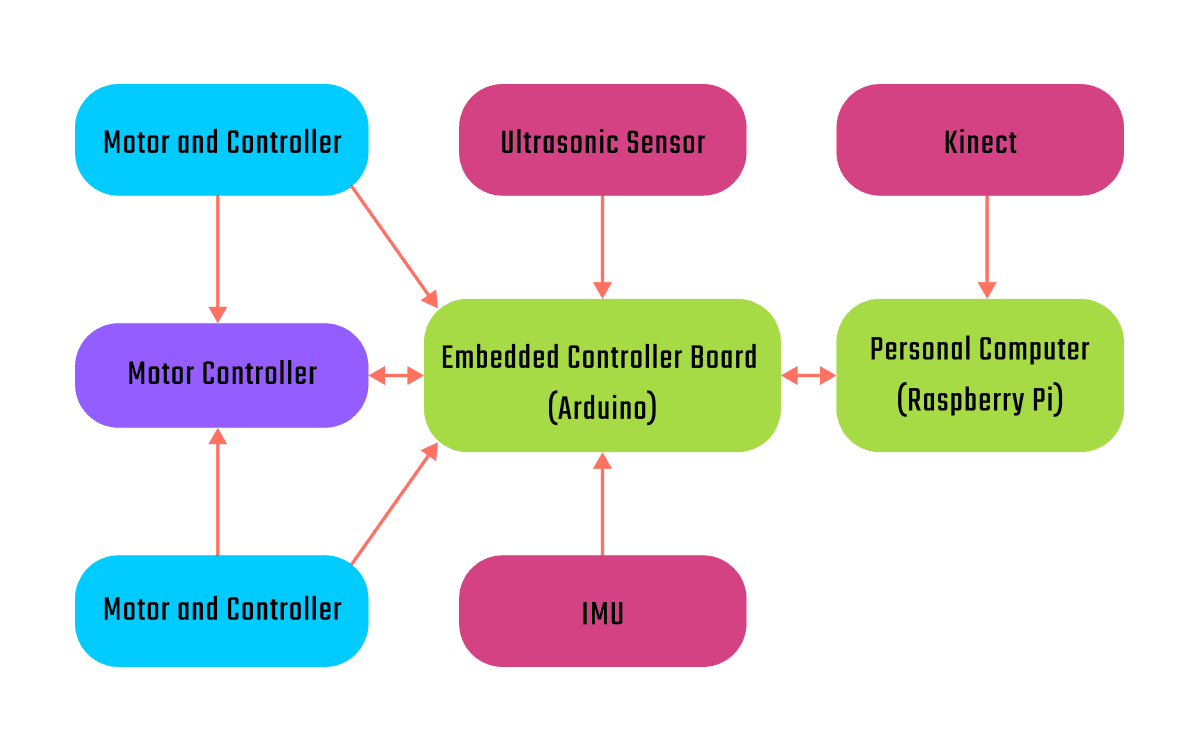
The TurtleBot configuration includes a mobile base, Microsoft's Kinect for 3D sensing, Raspberry Pi as a Single Board Computer (SBC), Arduino Uno for control purposes, and various sensors like ultrasonic and Inertial Measurement Unit (IMU). Its easy accessibility and assembly using off-the-shelf components make it a versatile and cost-effective platform.
SLAM Algorithms and Sensors:
The implementation involves SLAM algorithms like Adaptive Monte Carlo Technique using particle filters for robot localization. Kinect's 3D depth sensing, IMU's motion tracking, and ultrasonic sensors for obstacle detection are integral parts of the navigation and mapping process.
Hardware and Control Units:
The choice of hardware components, including Arduino Uno and Raspberry Pi 3, highlights their roles in interfacing motors, sensor data collection, and executing navigation algorithms. The open-source nature of Arduino and Raspberry Pi fosters an accessible development environment.
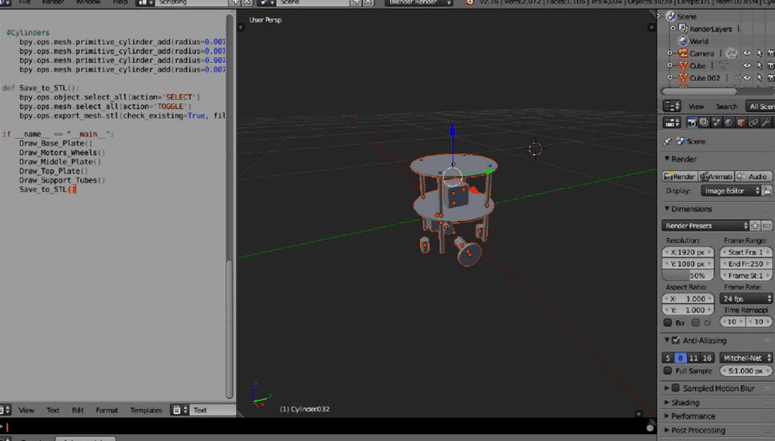
3D Design and Control Units:
The use of Blender for 3D modeling and Python for creating a 3D model of the TurtleBot enhances its visual representation. Arduino Uno controls motors and sensors, while Raspberry Pi collects sensor data and executes navigation algorithms.
Conclusion:
The project's primary achievement lies in creating an economically viable indoor service robot with real-time SLAM-based navigation and obstacle avoidance. Leveraging ROS for easy portability and compatibility with Raspberry Pi contributes to its adaptability across various operating systems.
This project showcases a commendable blend of innovation, accessibility, and cost-effectiveness, making robotics technology more accessible for societal benefits in assisting individuals with special needs or the elderly.